Euler Angles and Quaternions
Euler Angles and Quaternions
From BabylonJS version 2.5 Euler angles for use in mesh.rotation can always be found from a built in method. For some conventions of using Euler angles a quaternion can be found from those angles. Once found the quaternions can be used to rotate a mesh.
Quaternions from Euler Angles
YXZ Local Axes Yaw, Pitch, Roll
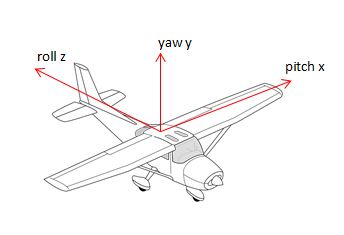
var yprQuaternion = BABYLON.Quaternion.RotationYawPitchRoll(yaw, pitch, roll);
Playground Example Yaw Pitch Roll to Quaternion -
ZXZ World Axes A Standard Convention
Rotations alpha about Z, beta about X, gamma about Z around the world axes
var abcQuaternion = BABYLON.Quaternion.RotationAlphaBetaGamma(alpha, beta, gamma);
Playground Example ZXZ to Quaternion -
Euler Angles from Quaternions
The Euler angles that can be used in mesh.rotation can be found from any quaternion the following method
var euler = quaternion.toEulerAngles();
To illustrate this the following playground generates three random angles, puts the axes XYZ into a random order and selects at random either to use world or local for all axes. This data is then used to randomise the orientation of a box. The rotationQuaternion for this box is used to generate Euler angles to rotate another box, box1, using box1.rotation to obtain the same orientation as the first box.
Playground Example Random Orientation to Euler Angles for mesh.rotation -